Parte 2
Ahora veremos cómo podemos integrar planos en nuestro sistema. Para definir un plano en 3D necesitamos un punto que pertenezca al plano p0 y la normal al plano n. Para mantener las cosas simples vamos a usar planos infinitos. Para saber si un punto p pertenece al plano infinito se tiene que cumplir que:
np.dot(p - p0, n) == 0
Es decir, el segmento entre el punto p y p0 es perpendicular a la normal del plano.
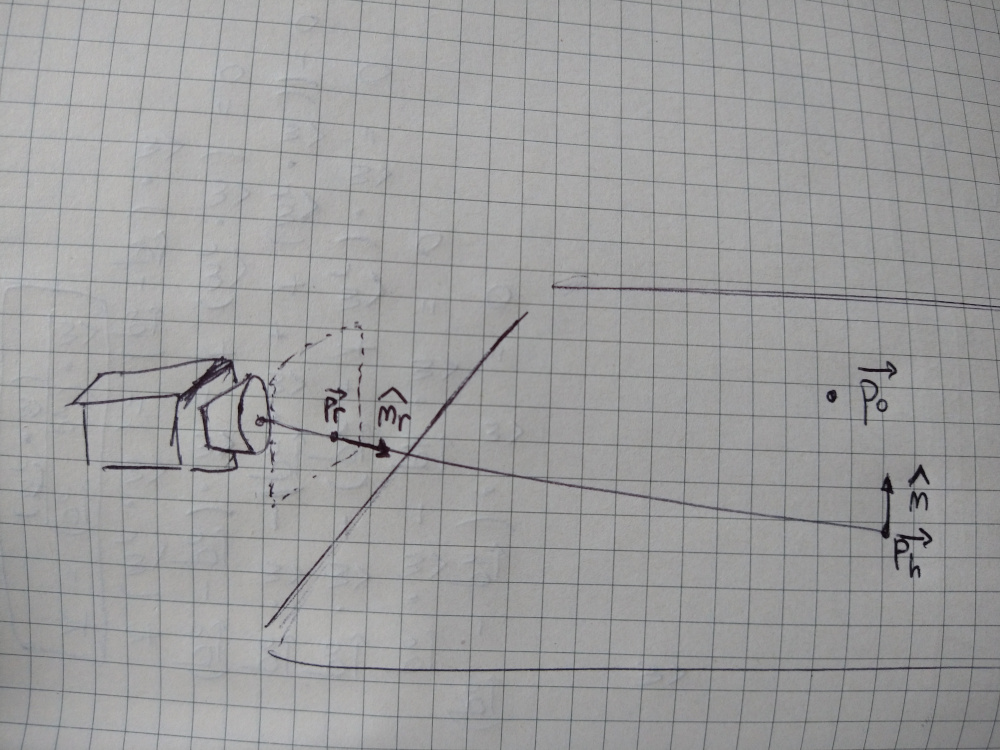
Luego para obtener intersección entre un rayo y un plano, podemos suponer
que existe una intersección y escribir la ecuación que cumpliría el punto de
intersección ph. Además, recuerda que todo punto p en el rayo cumple
con p = pr + t * nr con t > 0.
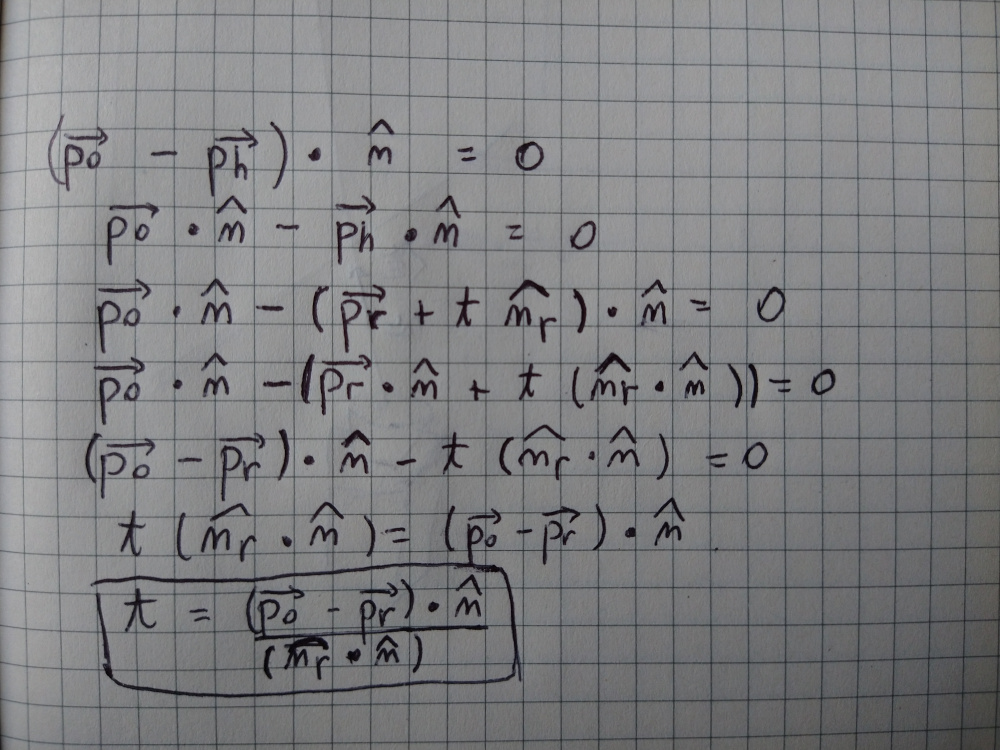
De este modo tenemos:
- Si se cumple
np.dot(nr, n) == 0significa que la normal del plano es perpendicular al director del rayo, lo que significaría que nuestro rayo es paralelo al plano. Por lo tanto, o no lo intersecta, o lo intersecta siempre si se superponen. - Si
t < 0parat = np.dot(p0 - pr, n) / np.dot(nr, n), quiere decir que la intersección se encuentra por detrás del inicio de nuestro rayo (pr) y por tal motivo no vemos ese punto desde la cámara. - Si
t > 0entonces hemos encontrado la intersección.
Así nuestro código para intersectar un rayo queda así:
def intersect_plane(self, plane):
n_dot = np.dot(self.nr, plane.n)
if n_dot == 0:
return -1
t = np.dot(plane.position - self.pr, plane.n) / n_dot
if t > 0:
return t
return -1
También tendremos que crear nuevas clases Scene que tendra una colección de SceneObject que serán los objetos en nuestra escena (como esferas y planos). Y actualizar la función render para que en vez de tomar un solo objeto, tome una escena entera para renderizarla, y la función raytrace también para que tome la escena entera y calcule el color para el punto de intersección más cercano. Nota que un rayo podría intersectar varios objetos de una escena pero solo el más cercano será el que veremos.
class Scene:
def __init__(self):
self.objects = []
class SceneObject:
def __init__(self, pos, color):
self.position = pos
self.color = color
def normal_at(self, p):
pass
class Plane(SceneObject):
def __init__(self, pos, color, n):
SceneObject.__init__(self, pos, color)
self.n = n
def normal_at(self, p):
return self.n
def raytrace(ray, scene, light):
min_t = np.inf
hit_obj = None
for scene_object in scene.objects:
t = ray.intersect(scene_object)
if t > 0 and t < min_t:
hit_obj = scene_object
min_t = t
if hit_obj is not None:
ph = ray.at(min_t)
n = hit_obj.normal_at(ph)
l = utils.normalize(light.position - ph)
diffuse_coef = np.dot(n, l)
t = max(0, diffuse_coef)
color = t * hit_obj.color
return color
else:
return np.zeros(RGB_CHANNELS)
Nota que también hemos cambiado la forma en que devuelve valor la función intersect. Antes devolvía un punto, ahora para simplificar la comparación de qué está más cerca y qué está más lejos usamos t, que es el escalar que nos dice cuánto avanzamos en el rayo desde su punto de partida pr.
Finalmente nuestra función main queda así:
def main():
# Create sphere
sphere_pos = np.array([0, 0, 1.5])
sphere_rad = 0.4
color_purple = np.array([75 / MAX_COLOR_VALUE, 0, 130 / MAX_COLOR_VALUE])
sphere = Sphere(sphere_pos, color_purple, sphere_rad)
# Create plane
plane_pos = np.array([0, -0.4, 0])
color_gray = np.array([
130 / MAX_COLOR_VALUE, 130 / MAX_COLOR_VALUE, 130 / MAX_COLOR_VALUE
])
plane_n = np.array([0, 1, 0])
plane = Plane(plane_pos, color_gray, plane_n)
# Create Scene
scene = Scene()
scene.objects = [sphere, plane]
# Create light
light_pos = np.array([0, 1.5, 0])
light = PointLight(light_pos)
# Create camera
camera_pos = np.array([0, 0, 0])
v_up = np.array([0, 1, 0])
v_view = np.array([0, 0, 1])
d = 0.035
width_ratio = 16
height_ratio = 9
aspect_ratio = width_ratio / height_ratio
sy = d
sx = sy * aspect_ratio
camera = Camera(camera_pos, v_up, v_view, d, sx, sy)
pixel_scale = 40
width = width_ratio * pixel_scale
height = height_ratio * pixel_scale
img_arr = render(scene, light, camera, height, width)
img = Image.fromarray(img_arr)
img.save(OUTPUT_FILENAME)
print(f"Image saved in {OUTPUT_FILENAME}")
Lo que produce la siguiente imagen:
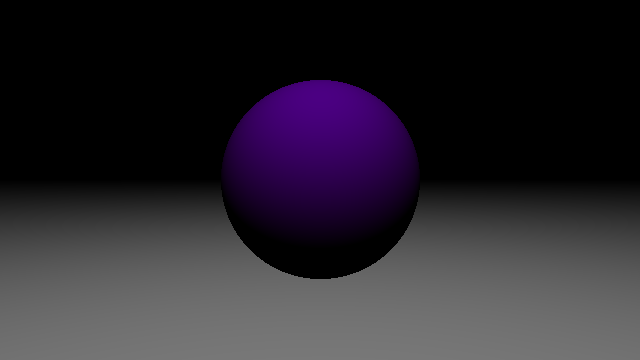
Progreso
Ahora que nuestro raytracer se demora un poco más, ya que hace muchos cálculos para las intersecciones, será mejor mostrar el progreso de nuestro programa para que podamos estimar cuánto falta para que termine de renderear. Para eso usamos la librería progress. Puedes encontrarla aqui.
En nuestro módulo render agregamos un Bar y luego nos queda así:
import numpy as np
from progress.bar import Bar
# local modules
from ray import Ray
from raytrace import raytrace
import utils
MAX_COLOR = 255
RENDERING_MSG = "Rendering"
RGB_CHANNELS = 3
def render(scene, light, camera, height, width):
output = np.zeros([height, width, RGB_CHANNELS], dtype=np.uint8)
total_count = height * width
bar = Bar(
RENDERING_MSG,
max=total_count,
suffix='%(percent)d%% [%(elapsed_td)s / %(eta_td)s]',
check_tty=False
)
for j in range(height):
for i in range(width):
xp = (i / width) * camera.sx
# we use height - 1 as the first value for y, because images
# start at the top pixel row
yp = ((height - 1 - j) / height) * camera.sy
pp = camera.p00 + xp * camera.n0 + yp * camera.n1
npe = utils.normalize(pp - camera.position)
ray = Ray(pp, npe)
color = raytrace(ray, scene, light)
output[j][i] = np.round(color * MAX_COLOR)
bar.next()
bar.finish()
return output
Con esto nuestro programa imprimirá en consola el progreso que lleva y también quedará cuánto demoró.
Eso es todo para esta parte del tutorial 😁, estén atentos a las próximas partes porque aun queda mucho por aprender!